MotoGP à Lupa, 2020: 7 – A eletrónica

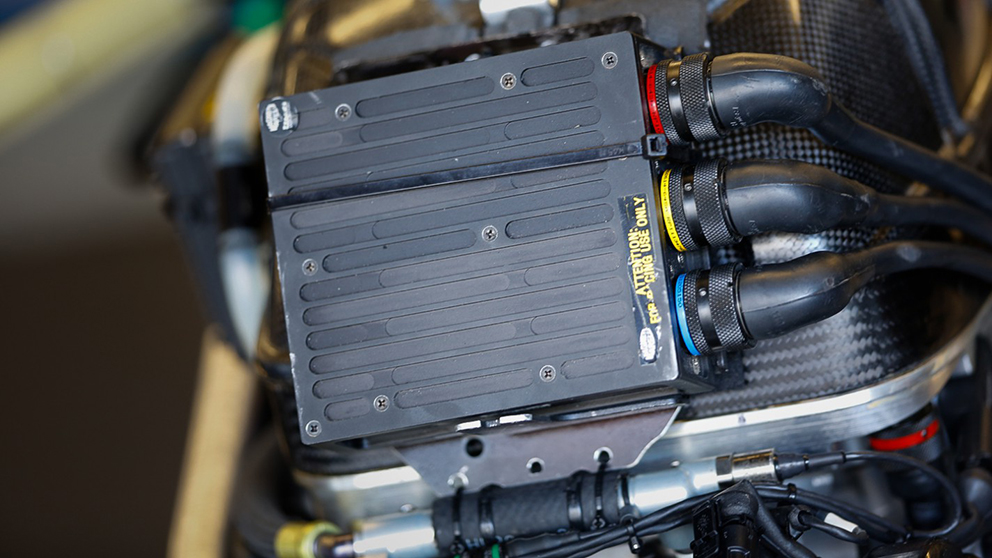
A Magneti Marelli é o fornecedor único da ECU de controlo usada em MotoGP, o módulo de Comando que foi introduzido em 2016, e é idêntico para todas as motos da grelha
A unidade da Magneti Marelli controla tudo numa máquina de Moto GP, desde a sensação do acelerador ao shifter e à travagem motor

Até 2016, cada fabricante podia escolher os seus parâmetros de eletrónica, sendo o céu o limite quanto a custos, o que claramente favorecia as marcas dispostas a gastar mais.
Assim, a Dorna introduziu, como medida de equalização e contenção de custos, um ECU comum obrigatório para todos, que se estendeu também à classe de Moto2.

Isto necessitou, claro, de um período de adaptação à unidade escolhida, a Marvel da Magneti Marelli, desenvolvida pelo engenheiro Marco Venturi (abaixo) já a partir de 2013 e que, propositadamente, era mais básica do que alguns dos sistemas privados usados até então e, portanto, não funcionava tão bem para cada fabricante.

A Honda, por exemplo, utilizava até então uma unidade secretíssima da Nippondenso e a Suzuki, material Mitsubishi.
A Ducati e a Yamaha, que já usavam a Marelli, tiveram a adaptação mais facilitada. Todas tiveram de se adaptar à nova regra de um ECU universal.
Esta unidade da Magneti Marelli controla tudo numa máquina de Moto GP, desde a sensação do acelerador ao comando do shifter e à travagem motor.
Isto, embora haja partes da eletrónica que permanecem livres e podem diferir em cada marca, como os injetores, bobinas de ignição, bombas de gasolina, sensores, que no entanto têm de ser homologados, etc.
O ECU, no entanto, acaba por controlar todas estas partes e é baseado num sistema com dois processadores centrais, um que contém o módulo de 32 Bits e 264 Megahertz e é conectado através de Can Bus, o sistema que permite a microprocessadores “falar” entre si.
O outro processador, de 800 Megahertz, controla o software de dinâmica do veículo que interfere no comportamento de moto e também passa informação para o módulo de recolha de dados.
A área dedicada à recolha de dados, ou telemetria, tem 1024 canais e recolhe dados a uma razão de até um kilobite até um total de 8 GB de dados armazenados.

Os dados são recolhidos através de 26 sensores, que controlam tudo, desde a posição do acelerador ao movimento da suspensão, controlo pneumático de válvulas (onde este é utilizado) e todos os parâmetros dos sensores internos, desde o controlo de aceleração, temperatura, voltagem, e a chamada plataforma de inércia que recebe dados de seis acelerómetros e seis giroscópios.
A maneira como se obtém o controle de tração também difere: a maior parte medem a velocidade relativa das duas rodas, e se a roda da frente de repente desacelera, tipicamente mais de 12% em relação à roda traseira, normalmente acompanhado por extensão completa da suspensão dianteira, o sistema interpreta isso como a roda estar no ar e a moto estar a levantar a frente, e portanto corta momentaneamente a injecção para contrariar isso.
Em curva, os sensores de inclinação, informados pelo pacote inercial de giroscópios terão também influencia na reação do acelerador.
Começando por 20 mapas injecção, desde um que é definido como 1:1, ou seja, dá uma sensação muito direta ao punho (e é portanto mais sensível a qualquer movimento do acelerador) a mapas mais graduais diferentes, até aos mais suaves que são destinados à condução à chuva.
Estes mapas estão também ligados a sensores de inclinação para suavizar a saída do acelerador conforme a posição da moto e são passíveis de ser mudados quase infinitamente ao gosto do piloto, caraterísticas da pista ou condições atmosféricas.

Uma das mudanças efetuadas é, por exemplo, a agressividade do controlo de tração que atua com mais força naturalmente nas primeiras mudanças e quase nada ou mesmo nada nas últimas, quinta e sexta, como nunca são utilizadas em curva. Normalmente, como vimos, os mapas vão de 1 para 1, ou seja a reação ao acelerador replica-se instantaneamente e por inteiro na roda traseira, para versões menos bruscas, que permitem, por exemplo, poupar o pneu na fase final de uma corrida.
Dentro de um certo limite, o piloto pode selecionar os mapas durante a corrida, por exemplo, para levar em conta a alteração da distribuição de peso na moto à medida que a gasolina de depósito se consome e a moto fica mais leve de frente.
Outro parâmetro regulado pela eletrónica é o Launch Control, que impede a moto de fazer cavalinho no arranque inicial.
O modo de Pit Lane, seleccionado através de um botão, mantém a moto em primeira e a cerca de 40 quilómetros hora no pit lane para evitar penalidades por excesso de velocidade.
Claro que isto funciona a partir de sensores ligados aos vários pontos da moto, que medem desde o regime motor ao afundamento de suspensão, inclinação, que é medida por giroscópios instalado na máquina, velocidade e tudo mais.
O próprio Launch Control é selecionável em três modos diferentes, de mais violento a menos, sendo que a maior parte dos pilotos preferem sempre o menos interferência possível na sua sensação de acelerador.
Uma coisa que está fora do alcance da eletrónica são os recentes controlos de arranque que mantém a suspensão comprimida no início e que tem sido adotados para algumas equipas, mas que são sistemas mecânicos, semelhantes aos usados em MotoCross.
A eletrónica controla, portanto, a sensação do acelerador fly-by-wire (cabos, que tinham de ser dirigidos através do quadro sem prisões ou dobras excessivas e isolados do calor do motor, são uma coisa do passado), a potência máxima debitada a qualquer momento, os mapas de injeção e as ajudas à condução ,como anti-derrapagem anti-Wheelie e velocidade máxima na box.
Outra particularidade do controle de tração utilizado em curva, ligado ao sensor de inclinação, é que este pode ser afinado curva a curva para o circuito. Até 2010 isso podia ser feito por ligação GPS, utilizando os dados do GPS para dar uma curva de ignição gorda e portanto seleção mais violenta, numa curva aberta e uma seleção muito mais suave, mas a começar mais de baixo, numa curva lenta, por exemplo numa chicane.
A ligação a GPS, considerada telemetria ativa, foi banida então, mas na prática, o mesmo efeito é conseguido ligando a volta à telemetria, que “sabe” onde a moto está no circuito.
Ao mesmo tempo, a eletrónica pode controlar mensagens passadas ao piloto sem que exista, no entanto, a possibilidade de contacto com a box, embora este ano a Dorna tenha experimentado com ligações via rádio entre box e o piloto nalguns testes.
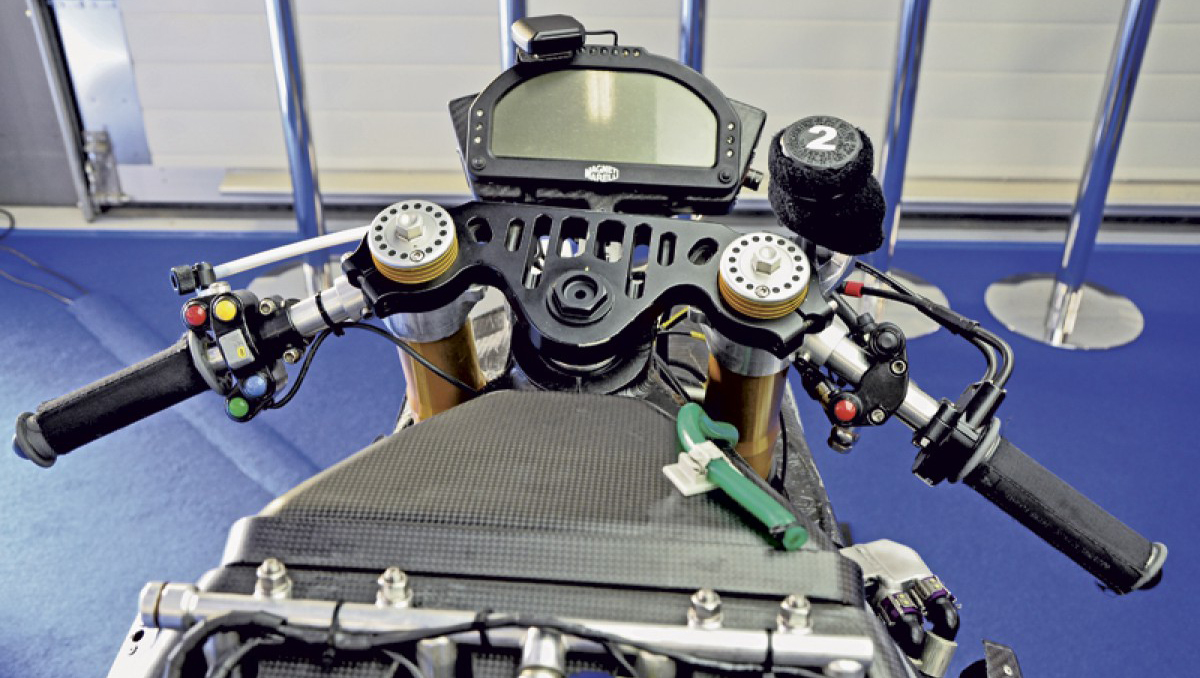
O uso de eletrónica ativa, ou seja, comandar os sistemas a partir da box durante a corrida, é completamente proibido, mas o piloto pode ter uma variedade de parâmetros programados para utilização acessíveis através dos botões no guiador, empregando como vimos vários mapas de injeção mais violentos ou mais suaves, e mudanças diminutas no ajuste da suspensão à medida que o peso da moto muda a atitude e distribuição de peso.
Outra coisa controlada pelo ECU, claro, é a travagem motor, que também leva em consideração a velocidade de moto, ângulo de inclinação e pressão no travão traseiro.
Esta regulação faz com que as borboletas de injeção abram para deixar entrar ar e minimizar o efeito de travagem motor, que poderia bloquear a roda traseira ou até partir o motor, piois os limitadores de rotação não funcionam perante uma força mecânica dos pistões a “empurrar” a roda.
O sistema também leva em conta a chicotada da folga nas correntes que faria a fase inicial de aceleração ser irregular e variar o movimento.
Este mapa é alterado a cada 50 milissegundos para suavizar a fase de aceleração.
O display em quartzo líquido que o piloto vê pode conter um número enorme de informações, desde uma saudação ao piloto (“Olá Miguel!”) quando se liga, a temperaturas, condições atmosféricas, mapas seleccionados de injecção, controlo de tração e dureza da suspensão, a pressão de óleo, regime do motor, mudança seleccionada, aproximação do limite de rotações, mensagens da direcção de prova, como uma penalidade de volta longa, ou até informação de segurança, como uma situação de bandeira vermelha ou várias outras.
Ao fim e ao cabo, vemos que, independentemente do número de controles electrónicos utilizados, e do grau de interferência que eles possam ter na condução o piloto e a sua sensibilidade permanecem o fator mais importante, sem o qual todos os outros não tem significado!
-
 MotoGP, Jorge Martín ‘Não estaria aqui sem a Red Bull Rookies Cup’25 Novembro 2024 08:45
MotoGP, Jorge Martín ‘Não estaria aqui sem a Red Bull Rookies Cup’25 Novembro 2024 08:45 -

-
 MotoGP, Jorge Martin: “Não basta ganhar, é preciso algo mais”24 Novembro 2024 19:45
MotoGP, Jorge Martin: “Não basta ganhar, é preciso algo mais”24 Novembro 2024 19:45 -
